让AGV具备料笼、托盘等精确对接的能力是移动机器人视觉领域的刚性需求,不仅能提升移动机器人的作业效率,还能通过移动机器人在不同工作站的准确对接,实现柔性制造。
让AGV具备料笼、托盘等精确对接的能力是移动机器人视觉领域的刚性需求,不仅能提升移动机器人的作业效率,还能通过移动机器人在不同工作站的准确对接,实现柔性制造。
然而,实现AGV叉车的料笼堆叠功能却面临着一系列技术挑战,可以说是移动机器人应用领域的"珠穆朗玛峰"。
难点一:高精度要求
上下料笼堆叠的容差较小,不允许物料和容器之间出现摩擦。随着堆叠层数增加,确保安全需要实现高精度的定位和复核工作。
难点二:多样化的料笼和货物
对于3D视觉定位系统,需要适应不同类型的料笼和货物,根据实际应用需求进行精准适配和自适应调整,以满足各种应用场景的需求。
难点三:复杂多变的工业和物流场景
不同工业场景的光照和工作环境可能对对接工作产生干扰,因此需要应对复杂多变的环境条件。
迈尔微视M4 Pro 3D视觉相机,深度融合自研AI算法,将上述用户难点、痛点逐个击破,为AGV叉车提供软硬件一体的料笼堆叠定位解决方案:支持多层堆叠;高适配性,可智能识别料笼;AI算法加持, 完成自主纠偏;并能适应苛刻工业环境的运作要求。
M4 Pro
技术优势
更高、更快、更高精,料笼堆叠稳定可靠
自研AI算法,智能识别料笼、自主纠偏
迈尔微视iToF旗舰硬件,以领先性能应对苛刻场景
M4 Pro
实测案例
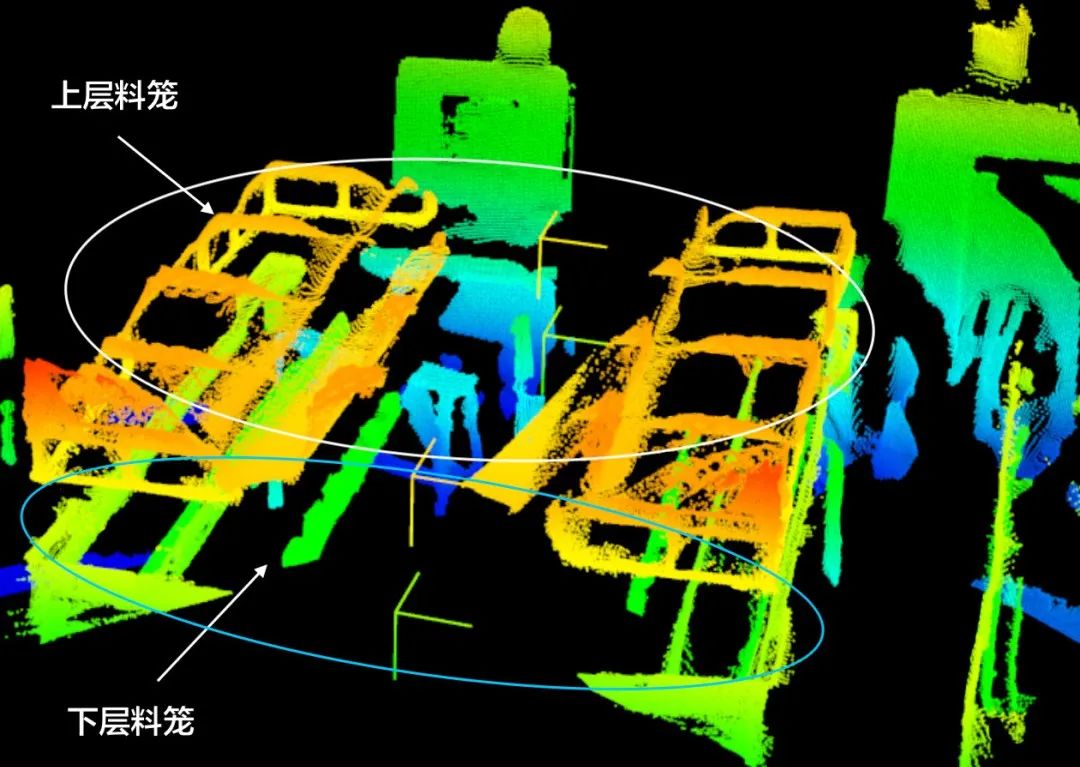
- 多层堆叠
实现单层1.6米高的料笼四层堆叠
- 高精度对接
- 异常警报
M4 Pro
核心产品
M4 Pro作为蓝芯科技Eagle系列的第四代深度相机,集成了iTOF相机及三通道真彩色RGB图像(或单通道MONO)输出,同时搭载强大的带8核处理器的ARM算法平台,可以不加外部CPU的情况下实现视觉SLAM、视觉定位等应用算法,让3D视觉赋能移动机器人。
- 一体集成,算力强大
算力高达6.0Tops,无需外部CPU即可运行应用算法
- 测量范围广
可覆盖0.3-5米距离范围
- 环境适应性强
抗100KLUX阳光干扰
【产品参数】