移动机器人(AGV)是工业机器人的一种。它由计算机控制,具有移动、自动导航、多传感器控制、网络交互等功能,在实际生产中最主要的用途是搬运,可以说只要有搬运需求的地方,就有移动机器人的应用可能。
移动机器人(AGV)是工业机器人的一种。它由计算机控制,具有移动、自动导航、多传感器控制、网络交互等功能,在实际生产中最主要的用途是搬运,可以说只要有搬运需求的地方,就有移动机器人的应用可能。
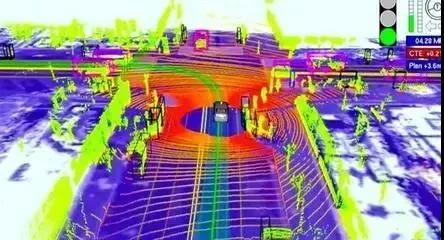
机器人要移动,首先要解决能“开天眼走路”的问题,其实这就对应到定位和导航的问题。传统的导航是通过固定磁条、激光反光板定位结合事先设置好地图的方式来实现
为提供系统的柔性和部署的快捷,实时的定位和建构电子地图的技术被逐步的发展起来并逐渐应用到工业移动机器人场景中。这种实时的构建技术被叫做SLAM。
SLAM它试图解决这样的问题:一个机器人在未知的环境中运动,如何通过对环境的观测确定自身的运动轨迹,同时构建出环境的地图。
SLAM技术正是为了实现这个目标涉及到的诸多技术的总和。由于其重要的理论与应用价值,被很多学者认为是实现真正全自主移动机器人的关键。
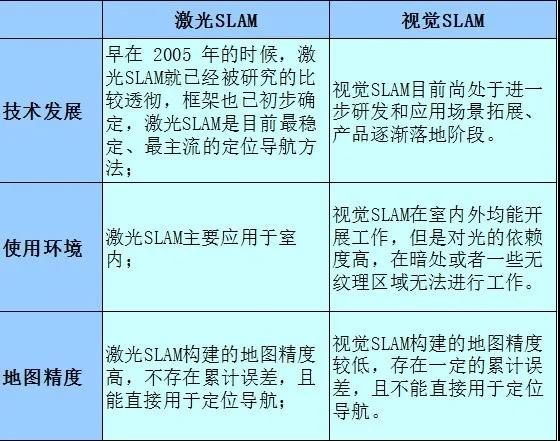
按照核心的功能模块来区分,目前常见的移动机器人SLAM系统一般具有两种形式:基于激光雷达的SLAM(激光SLAM)和基于视觉的SLAM(Visual SLAM或VSLAM)。
激光SLAM与视觉SLAM比较
通过对比我们发现,激光SLAM和视觉SLAM各擅胜场。两者相较,激光 SLAM 构建的地图精度高,不存在累计误差,且能直接用于定位导航。
当然,激光SLAM也有一定的局限性。比如在又长又直、两侧是墙壁的长廊或是动态变化大的环境中,单纯依靠激光SLAM容易发生定位丢失的情况。
其实,要想让移动机器人应对各种复杂的使用场景,激光SLAM与视觉SLAM必将在相互竞争和融合中发展,多传感器融合导航必然是未来发展方向。伴随移动机器人核心技术的解决,将替代人工完成简单、重复、劳动量大的繁杂工作,真正为人类服务。