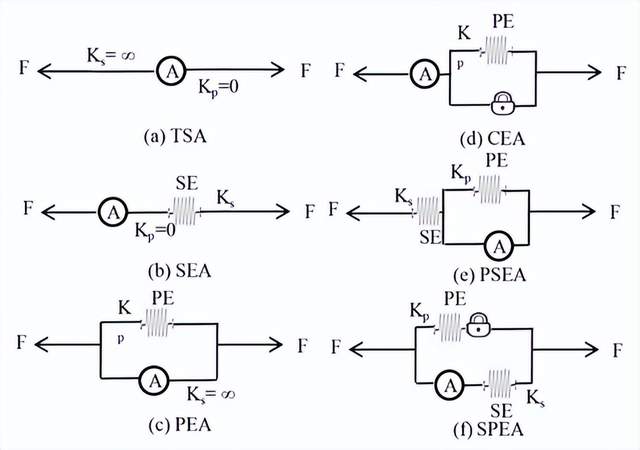
符号A 表示一般驱动元件,即刚性驱动器,图4a-f[31]中表示由驱动元件A与 SE、PE 单元共同作用构成的弹性驱动器模型,ks和kp分别为 SE 和 PE单元的刚度。PSEA 和 SPEA同时具有 SE 和 PE 单元,因此称为多模态弹性驱动器MEA(multi-mode elastic actuator)。刚性驱动器、串联弹性驱动器、并联弹性驱动器PEA (parallel elastic actuator)和离合弹性驱动器CEA(clutched elastic actuator)均为基本模型,它们是MEA的特例形式。近年来研究成果及应用主要集中在串联弹性驱动器、并联弹性驱动器、离合式弹性驱动器和多模态弹性驱动器。
图3 Hill肌肉力模型
2.2.1 串联弹性驱动器
串联驱动器是在驱动元件和负载间增加弹性单元,这样可以缓冲外部冲击和储能。
图4 弹性驱动器类型
麻省理工学院的Pratt等最早提出了SEA的概念,并证明了SEA具有抗冲击性,较低的反射惯性,更精确和稳定的力控制性能,减少对环境的破坏和能量存储,继而开展了SEA的闭环力控和在腿足机器人上应用研究。
经过几十年的发展,SEA近些年的研究主要集中在变刚度设计、控制和应用上。Vanderborght等研究了机械可调节的柔度和可控制的平衡位置驱动器,其柔度和平衡位置可以完全独立地控制,并且两者均由专用伺服电机设定。Sariyildiz等研究了新型SEA的运动控制问题(即位置和力控制问题),提出了一种基于加速度的鲁棒控制器。
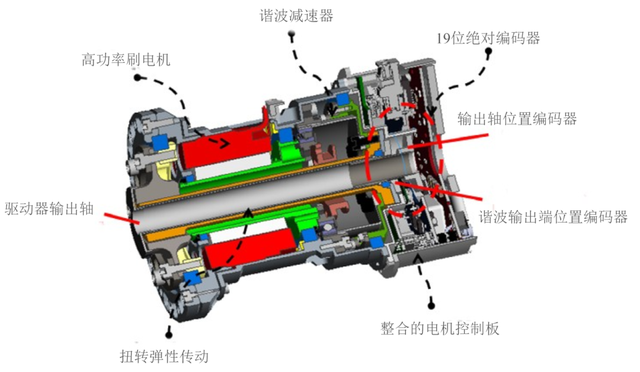
通过串联软弹簧和硬弹簧实现可变刚度的SEA,以便减少常规SEA的基本性能限制。Haddadin等通过优化控制,实现最大化变刚度弹性驱动器的输出速度,由于弹性驱动器储能作用,其最大输出速度,超过理论电机输出能力。为解决救灾机器人跌落和与环境的碰撞问题,意大利技术研究院设计了新型的弹性驱动器,该驱动器应用于WALK-MAN机器人手臂,实验验证了负载能力和抗冲击能力。如图5所示,在谐波减速器输出端和驱动器输出间设置了弹性零件扭力杆。
图5 弹性驱动器
由上述分析可知,SEA具有缓冲机器人触地冲击和缓解外部碰撞冲击的作用,同时还可以储存能量,但由于弹性元件引入,系统变为欠驱动系统,因此运动控制精度较低。
2.2.2 并联弹性驱动器
并联驱动器是在驱动元件基础上增加并联的弹性元件,共同作用于被驱动对象,是通过控制驱动元件来调节并联弹性元件的能量储存和释放。
Mettin等将PEA原理应用于2阶倒立摆模型中,将被动弹簧与欠驱动执行器并联,可以显著降低能量损耗。Niehues等通过数学建模证明,在机器人关节存在时间延迟的情况下,PEA可以提高稳定性和鲁棒性。同时设计2个具有PEA的2自由度肌腱驱动手指,实验结果表明,在实现平滑轨迹跟踪,特别是在稳定性和对冲击的鲁棒性方面,机器人手中引入PEA具有优势。
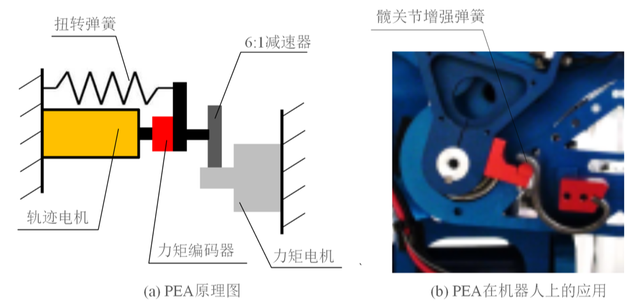
Brown等在机械臂中加入平行弹簧元件,加了设计合理的弹簧可以将电机峰值转矩降低约50%,并将能耗降低25%。Borras等在 Stewart 并联机器人的关节处增加并联弹簧,提出了简单的优化策略,结果表明当并联机器人受特定力,例如重物压在平台上时,PEA 能够大幅减小驱动元件的输出力矩,通过该方法在刚性不降低的情况下实现了小功率电机驱动大载荷。Mazumdar等研究双足机器人腿部应用PEA,如何减少能量损耗,提高能量利用效率,如图6所示。a是PEA的原理图,b展示PEA在机器人髋关节上的应用。Toxiri等将PEA应用于上肢外骨骼机器人,相对于不增加平行弹性元件的设计明显减少对电机力矩的需求,同时改善了控制性能。
图6 并联驱动器
由上述分析可知,并联弹性元件可以实现能量存储和释放的作用,相对传统刚性驱动器并联弹性驱动器可以显著提高输出功率,降低能量损耗。存在的问题是配合机器人运动,如何最大化的实现能力储存和释放。
2.2.3 离合弹性驱动器
离合弹性驱动器是在串联弹性驱动器或并联弹性驱动器的弹性元件位置增加离合装置,控制弹性元件开合,以控制弹性元件的能量储存和释放。
Haeufle等介绍了CEA初始原型机的设计和控制,原型机包括直流电机、弹簧和低成本的电子离合器,模仿人体反弹任务中膝部伸肌的扭矩和运动模式,实验表明原型机中的并联弹簧将执行器的能耗降低了约80%,将直流电机的峰值扭矩需求降低了约66%。Plooij等介绍了双向离合并联弹性执行器(BIC-PEA)的概念和设计,验证了通过控制离合在时间和方向上加载和卸载,并行弹簧可以减少机器人的能耗,具体设计如图7所示。另外,Plooij等根据形态不同,把CEA分为9类,并提出了CEA功能分析的数学方法。Penzlin等把CEA设计用于外骨骼机器人,通过非线性模型建立、样机制作和试验,证明CEA可以提高外骨骼设计的效率。DeBoon等研究CEA在康复外骨骼机器人上的应用,驱动器包括直流电机、扭簧和磁粉制动器,提出自由运动、弹性运动和辅助阻抗运动3种制动模式。
图7 离合驱动器
由上述分析可知,由于离合装置的引入,CEA可以控制弹性元件能量的储存和释放,大幅提高了能量效率,具体的应用领域可以灵活的设置弹性元件和离合机构的形式,此领域是目前研究的热点。
2.2.4 多模态弹性驱动器
针对单一驱动器不能满足机器人瞬时高输出扭矩、能量效率和抗冲击能力的问题,提出了多模态弹性驱动器的概念。
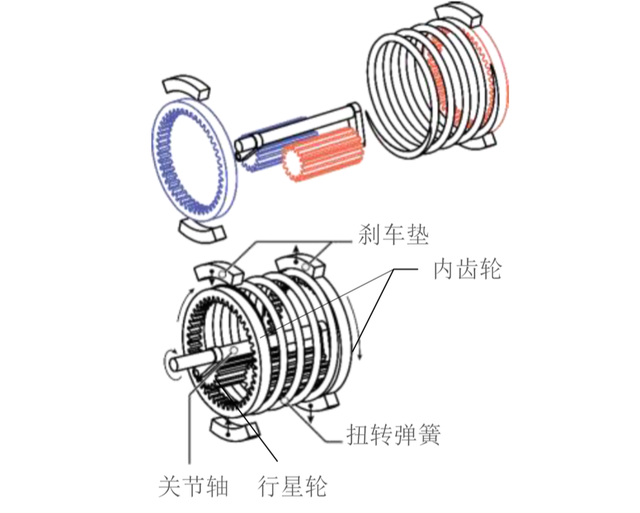
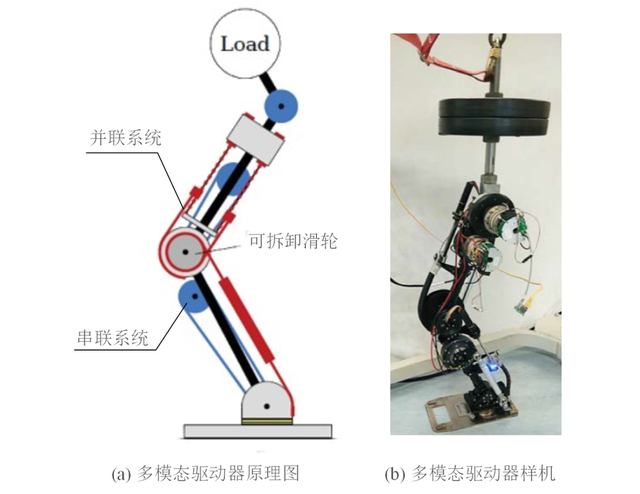
Mathijssen等研究串并联驱动器SPEA,平行弹性元件可变的载荷储存和释放,使用多个带有锁紧环和锁板的不完全齿轮作为与电动机并联的间歇机构。结果表明该装置可以降低电动机扭矩要求,减小电动机的尺寸,提高效率。Geeroms等设计一种多模态驱动器应用于假肢,同时具有并联和串联弹簧,并联弹簧可以锁定,相对顺应性和直接驱动的人工膝关节,新构型驱动器的膝关节能量消耗小,水平走路运动轨迹和健康膝关节更接近。Roozing等基于三自由度腿部机器人,研究了只有SEA和SEA加并联储能分支的区别,原理和原型机如图8所示,实验证明,加并联储能分支可以节能53%以上。
由上述分析可知,多模态弹性驱动器集合了单一驱动器的优点,可以实现很好的储能和节能。但整体结构复杂,系统建模和控制也变得复杂。
图8 多模态驱动器
2.3 准直驱驱动器
准直驱驱动器含义是依靠驱动器电机开环力控,不依赖于附加力或力矩传感器,就可以本体感知机器人脚部和外界的交互力,也被称为本体驱动器。当然,最理想的是电机直接驱动,但受限于电机工艺和技术,电机直驱驱动器的扭矩密度不能满足机器人应用的需求,因此,折中采用电机加低传动比减速器的方案,同时要求负载质量和转动惯量尽可能的小,这样可以实现高带宽力控和良好的抗冲击能力。准直驱驱动器主要由高扭矩密度电机、低传动比减速器、编码器和控制板等组成。
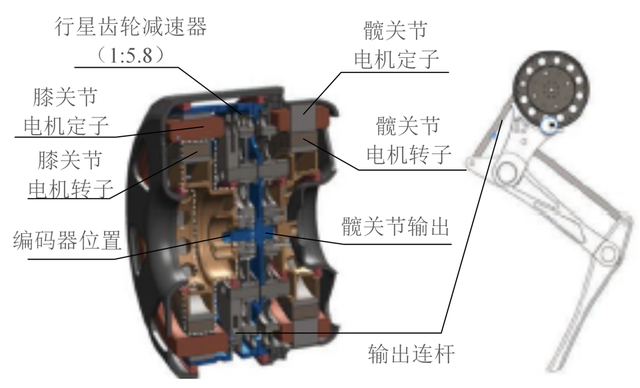
整体结构设计方面,Wensing等设计的准直驱驱动器使用内转子电机,减速器是传动比是5.8的精密行星减速器,如图9所示。Benjamin等设计了改进版的准直驱驱动器,并搭建了四足机器人Cheetah和双足机器人Hermes,进行了测试。如图10所示,电机是外转子力矩电机,由于直径增加,电机力矩和半径是平方关系,扭矩密度远高于内转子电机,传动比为6的行星减速器内嵌到电机内部,轴向尺寸紧凑。整个驱动器的扭矩密度35.4Nm/kg,功率密度达到1416W/kg,超过了肌肉的功率密度500W/kg。
图9 准直驱驱动器
图10 改进版准直驱驱动器
宇树科技提出了一种新的准直驱驱动器结构,在电机基座和内齿圈间增加了离合结构,当外界负载冲击力即将超过减速器零件极限时,离合结构发生作用,外界冲击能量转换成摩擦热量损耗掉,保护减速器不损伤,结构如图11所示。另外,在驱动器的电机端和输出端都设置了位置编码器,电机轴采用中空结构。银弗科技提出了一种紧凑型准直驱驱动器,把四点角接触轴承的滚道直接设置在行星减速器的机架上,减少驱动器的轴向尺寸,减轻重量,具体结构见图12。优必选科技提出一种轴向尺寸紧凑型准直驱驱动器,如图13所示,驱动器的控制板布置在电机下方,第一级行星减速器嵌入电机定子内部,第二级行星减速器设置在电机外部,极大减少驱动器的轴向尺寸。