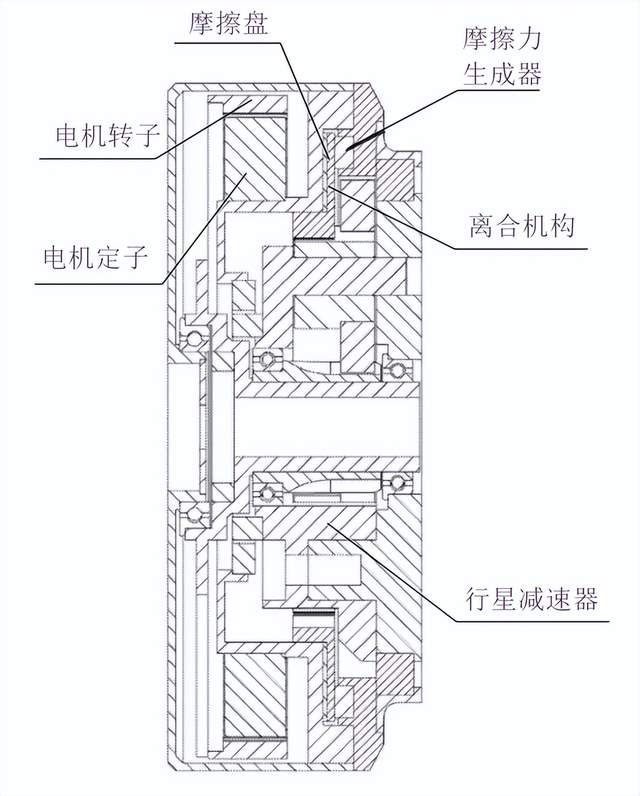
图11 带离合功能的准直驱驱动器
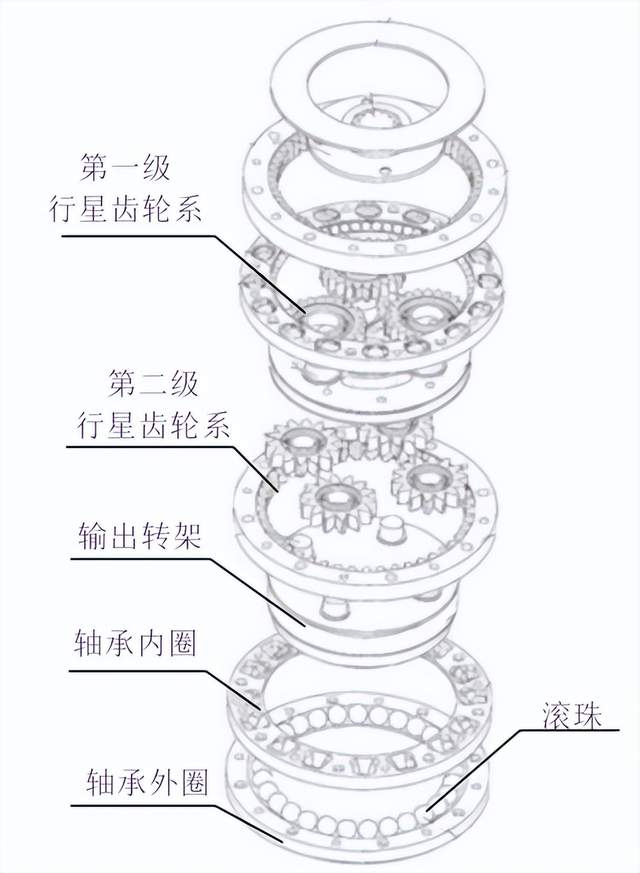
图12 紧凑的准直驱驱动器
图13 紧凑的准直驱驱动器
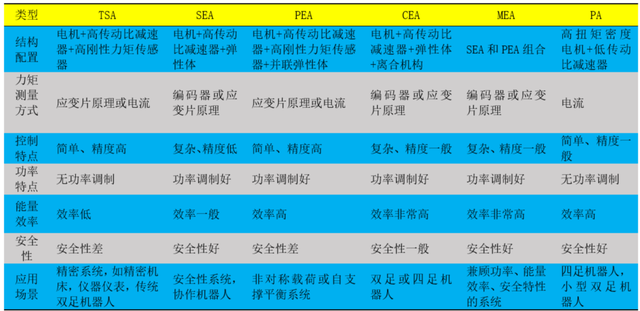
2.4 3种驱动器比较
综合以上对刚性驱动器、弹性驱动器和准直驱驱动器的论述,对3种驱动器的结构布局、力矩测量方式、控制特点、功率特点、能量特点、安全性和应用场景等进行比较。
如表2所示,结构布局方面,TSA是常规无刷电机驱动高传动比减速器,直接带动输出端,有些设计在电机端增加刹车,在减速器和输出端增加高刚性力矩传感器;弹性驱动器,SEA是常规无刷电机驱动高传动比减速器,在减速器和输出端间增加弹性体,PEA是在TSA的基础上增加平行的弹性机构,CEA是SEA或PEA的基础上增加弹性体开关机构,MEA上PEA、SEA和CEA的组合;准直驱驱动器是高扭矩密度电机驱动低传动比减速器,输出端具有小惯量特性。力矩测量方面,刚性驱动器是基于电流或应变片式力矩传感器,弹性驱动器是使用编码器原理或应变片式力矩传感器,准直驱驱动器是应用电流环检测。
控制方面,刚性驱动器控制相对简单,精度高,弹性驱动器中SEA控制复杂,精度低,PEA控制相对简单,精度高,CEA控制简单,但精度一般,CMA控制复杂,精度一般;准直驱驱动器控制简单,精度高。功率方面,刚性驱动器无功率调,SEA、PEA、CEA的功率调制性好,MEA功率调制非常好;准直驱驱动器的功率调制较差。能量特性方面,刚性驱动器的效率较低;SEA和PEA的效率一般,CMA、MEA和PA的效率高。安全性方面,刚性驱动器的安全性比较差;SEA和MEA用于有弹性体的保护安全性好,PEA安全性一般,CEA较差;准直驱驱动器由于具有反驱特性,安全性好。
表2 伺服驱动器特性比较
三、驱动器技术难点和发展趋势
双足仿人机器人驱动器经过30多年的发展,经历了从刚性驱动器到弹性驱动器和准直驱驱动器的过程。但目前双足仿人机器人的运动性能还远没有达到人类和动物的水平,驱动器技术还有一些难点需要克服,下一步的发展方向需要深入讨论。
3.1 技术难点
刚性驱动器应用在双足仿人机器人最早,设计理论也相对成熟,在传统的双足机器人、工业机器人、协作机器人和工业精密转台等方面得到广泛应用。但由于电机和减速器功率密度限制,在合适工作区间内的最大输出功率密度只能到200~300W/kg,远没有达到动物肌肉的500W/kg,这就限制其在双足仿人机器人上的应用。另外,刚性驱动器还没有建立标准检测方法和性能评价标准。
弹性驱动器经过多年的发展,取得了许多成果,SEA技术也在一些产品得到应用,如苏黎世理工的四足机器人ANYmal、美国宇航局的Valkyrie和意大利技术研究院COMAN等。但由于弹性体引入,系统为欠驱动,给控制带来了难度,尤其在机器人腿部使用,机器人整机的运动控制比较难实现。PEA、CEA和MEA技术应用于产品的相对较少,PEA很难控制并联弹性体的能量吸收和释放的时机,CEA很好解决串联弹性体何时开关的问题,但增加了辅助控制装置或机构,MEA结构和控制复杂。
准直驱驱动器是最近几年新兴技术,发展迅速,并在多了产品得到应用,如麻省理工的Cheetah、宇树科技的Laikago和云深处科技的绝影等。设计的初衷是提高驱动器的扭矩密度,瞬间响应性和抗冲击能力,同时降低成本,因为只有电机端有位置编码器,这就面临机器人断电了后,驱动器如何回到机械零位的问题。
3.2 发展趋势
研究表明,人类步行、疾跑和跳跃等动作脚底与地面冲击力是自重的3倍以上,双足仿人机器人若要达到近似人类或动物的运动能力,取决于驱动器系统相对于自重或负载的驱动能力,以及在传感系统、控制系统的感知和控制下快速响应能力。另外,还要综合考虑驱动器的能量效率和缓冲冲击能力等。
新设计原理方面,仿生学研究,以鸵鸟、鹌鹑和家禽等动物的腿部骨和骼肌肉为仿生对象,研究新的腿部构型,根据构型需求进而设计驱动器的形式,驱动器结合机器人整机设计、机器人运动控制整体考虑。
现有驱动器方案研究方面,刚性驱动器方向,虽然在人形机器人应用上受到限制,但在工业领域有广泛的应用,亟需建立性能指标的检测方法标准和评价标准,如回差、增速启动转矩、刚性、绝对精度、重复定位精度、效率、速度力矩曲线、扭矩力矩曲线、电流力矩曲线等。弹性驱动器方向,在PEA基础上增加离合装置控制平行弹性体的开关,这样可以控制能量的储存和释放,提高能量利用率,关键是离合装置如何做的简单和节能。
此外,弹性驱动器设计不能只停留在本身的整合设计,要结合机器人整机结构设计、驱动器设计、运动学和被动动力学对机器人做系统级优化设计,让机器人整体性能最优。准直驱驱动器方向,需要进一步研究单编码器驱动器回零点问题,研究绝对编码器如何取消后备电池,或延长电池的使用寿命,同时考虑改善设计和工艺,提高电机的功率密度,这两点问题解决了,准直驱驱动器就不限于只用于四足器人,也可以应用于双足仿人机器人和其他领域。
驱动器通信方面,通信方式随着5G、互联网和云技术的发展,驱动器可以无线与机器人上位机或云端总控相互通信,解决机器人内部走线复杂,线材易磨损问题,同时可以检测和监控驱动器的实时状态,计算与通信的集成化技术为驱动器智能化提供了各种可能。
四、结束语
随着中国经济和社会的发展,服务机器人必有广阔的应用前景,双足仿人机器人是服务机器人重要的组成部分,由于其类人的外形,更容易被人类接受。
本文对双足仿人机器人驱动器的历史、关键性能指标进行阐述,介绍了刚性驱动器、弹性驱动器、准直驱驱动器的发展现状,比较了各自特点,说明目前驱动器的性能还远没有达到生物肌肉的水平,因此双足仿人机器人的运动能力也没有达到人类或动物的程度。指出了驱动器下一步的发展方向,以双足动物为参考的仿生腿部机构研究,推动和机器人整机高度结合新驱动器构型的出现。现有驱动器方案方面,如果电机和减速器性能没有大幅提升的情况下,在双足仿人机器人领域刚性驱动器将会逐步被取代;弹性驱动器需要在功率密度、能量效率、结构布局等指标间平衡,结合机器人整机结构布局、运动步态控制算法做整合优化是下一步研究方向;准直驱驱动器技术发展迅速,编码器技术创新和电机功率密度上突破,是将来主攻方向。另外,驱动器通信技术革新也是一个发展趋势。
关键核心技术等不来、靠不来、买不来,需要脚踏实地研发、持之以恒投入,来不得半点侥幸。在产业界和学界的持续努力下,中国在伺服驱动器这一“高精尖”技术上取得了重要成果,打破了国际垄断,实现了自主量产。
优必选科技在成立前就开始攻克伺服驱动器的难关。截止目前,公司已设计和生产了40多种不同的伺服驱动器,掌握了从0.2Nm小型伺服驱动器,到120Nm大型伺服驱动器的量产能力,并在不同系列机器人上实现大规模应用,做到研产销链一体化。2016年,优必选科技累计生产伺服驱动器100万台,2019年,累计交付含伺服驱动器的机器人100万台。
全球首发!全新一代大型仿人服务机器人Walker X首次亮相#2021WAIC #世界人工智能大会 ,每一步前进,只为与你同行。现在就带你了解Walker X更丰富、更智能、更稳定的家庭服务能力!
机器人安上国产“关节”,见证了近年来中国科研力量着力抢占硬科技制高点,推动关键核心技术自主可控的坚持与努力。