针对室外大场景的移动机器人应用,绕不开的定位系统就是GNSS全球导航卫星系统了,在空旷园区、室外大广场、空旷农业基地和大型电站室外等场景下应用的移动机器人主要依赖的定位方式就是通过GNSS全球导航卫星系统实现的。
GNSS技术是指通过观测GNSS卫星获得坐标系内绝对定位坐标的测量技术。GNSS(Global Navigation Satellite System)全球导航卫星系统,主要有四个典型的代表,中国北斗卫星导航系统(BEIDOU),美国的全球定位系统(GPS), 俄罗斯的格洛纳斯卫星导航(GLONASS),欧洲的伽利略卫星导航系统(Galileo)。任一GNSS系统可以划分由卫星、地面观测站、用户接收机三部分组成。卫星上有精密原子钟,可以让所有卫星时间同步精度在纳秒级。地面观测站是对卫星位置,运动状态进行长时间精密观测,用来修正卫星的运动轨道信息。用户接收机用于接收卫星或基站信号进行解析。
GNSS广泛应用于手机导航、车载导航、测绘、农业、航空、机器人以及无人驾驶等领域。GNSS定位主要有两种模式,第一种是单点定位模式(Single Point Position),这种定位方式在空旷处的误差小于5m,但在多径干扰时误差可能会达到50m以上。第二种是差分全球导航卫星系统定位,又包括三类,即位置差分定位,伪距差分定位,载波相位差分定位。
差分定位方法在空旷地区的定位精度能够达到1m内,但在有多径干扰时容易造成50m以上的误差。城市环境下 GNSS 信号容易受到干扰和遮挡,单一的GPS系统可见卫星数、定位精度和可用性都会下降。现多采用GNSS结合IMU实现惯性导航,能够大大提高GNSS导航的鲁棒性,也越来越多的科研人员与工程师将GNSS与IMU,Lidar,camera结合实现精度更高鲁棒性更好的定位方式。

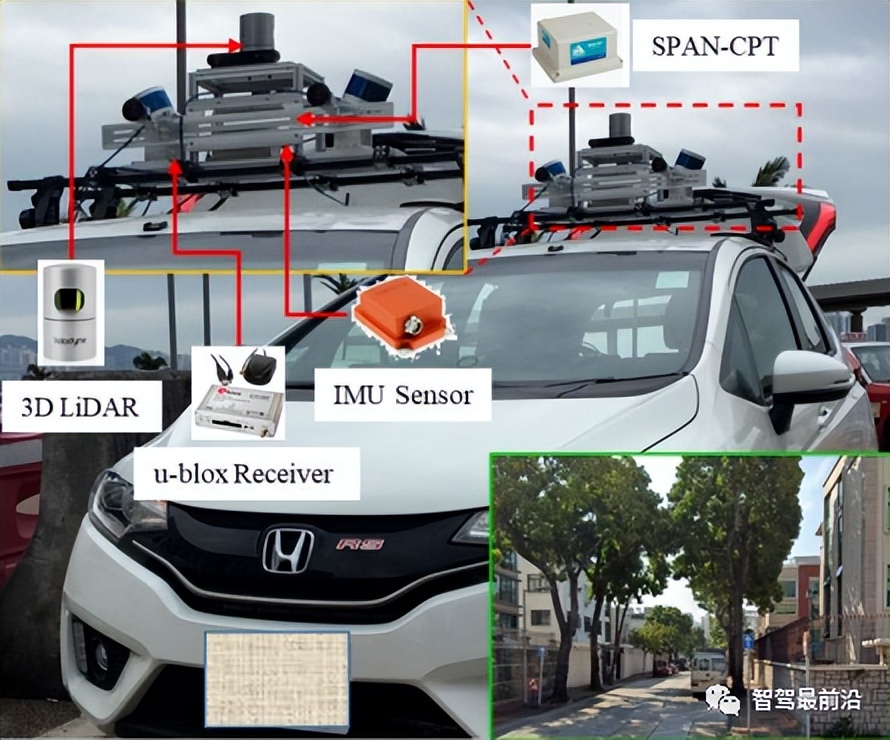
图1 GNSS定位示意图
1.2.磁导航
目前已经得到成熟应用的移动机器人(或者特指AGV)导航定位方式可分为磁导航与光导航两种,磁导航有电磁导引、磁带导引、磁钉导引等,光导航有色带导引、激光导航等。而市场上较常见的导航方式从技术角度分为三代,第一代是磁导航,第二代是二维码导航,第三代则是基于激光与视觉的SLAM算法导航,这三代导航定位系统会在下文中一一进行概述,虽然说是可以分成三代,但是每一代的定位方式都有其在应用场景中的优、劣势,每一代之间可以相互补充但难以做到完全替代,拟乎不应以“代”来划分。
磁导航,是诞生较早的导航方式,在机器人行进道路上铺设磁性物质作为引导的技术,磁性物质有地埋磁条,地埋磁钉,地埋电线,贴地磁条,RFID等。通过磁导航传感器不间断的感应磁信号,让车体一直保持在磁性轨迹上实现导航,通过读取预先埋设的RFID卡(路标)来识别当前位置。磁导航最大的优点是稳定可靠,且不受天气等自然条件的影响,即使风沙或大雪埋没路面也一样有效。但此系统实施过程比较繁琐,变更运营线路需重新埋设导航设备。根据行业应用场景,磁导航目前主要为码头集装箱自动搬运、工厂自动搬运的最优解决方案。


图2青岛港无人码头、工厂无人搬运
1.3. 二维码导航
二维码导航,使用设备扫描二维码来获取当前位置信息的导航方式。在仓储物流行业中,使用贴地的二维码,通过AGV车载扫描设备解析二维码获取实时坐标。这里的二维码专业描述是Data Matrix标签。二维码里包含有位置坐标和角度信息,当扫描设备经过码的时候可以实时读取到设备在二维码坐标系的位置和角度。
服务机器人行业里使用的是贴在天花板上的定制反光码,通过机器人最上方的鱼眼相机,红外发射器和红外滤光片实时探测天花板上的二维码信息,实现导航。目前二维码导航方案主要应用于仓储物流搬运,服务送餐机器人等行业领域。


图3仓储物流机器人和服务送餐机器人
1.4. 激光定位技术
所谓激光定位技术,是指主要通过激光雷达来实现机器人在环境中的定位的技术。激光雷达(Light Detection And Ranging,LiDAR)是一种通过测量激光脉冲飞行时间(Time of Flight, ToF)来测距的设备,在传统的机械激光雷达范围内,根据激光发射器数量的不同,可以分为单线激光雷达(2D激光雷达)和多线激光雷达(3D激光雷达),无论是哪种,都是作为测量环境中几何信息的传感器来使用的。
通常来说,激光定位技术首先需要通过对环境的SLAM(Simultaneous Localization and Mapping, 同时定位与建图技术)来建立地图,并在地图中规划作业路径,然后在作业时通过实时扫描与地图的匹配来获取自己在地图中的位置,实现实时定位。
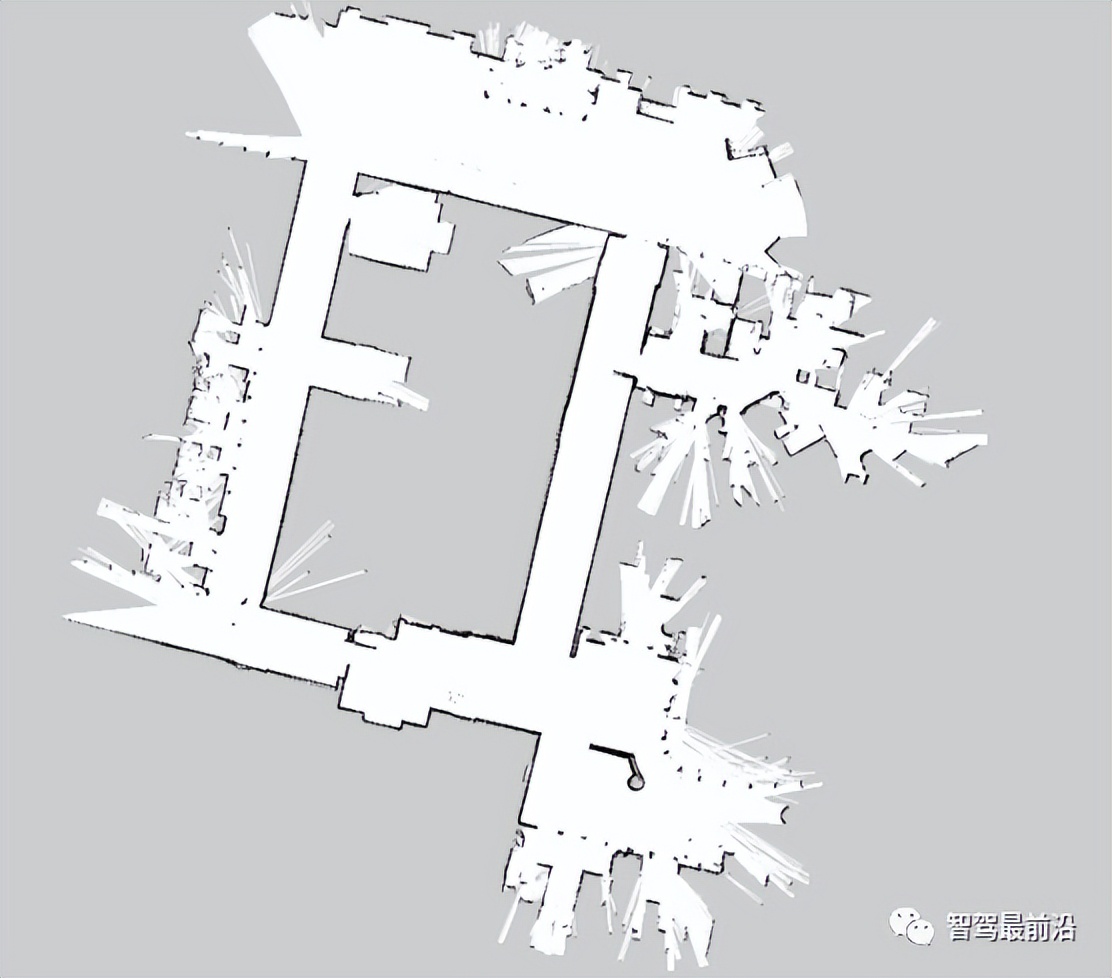
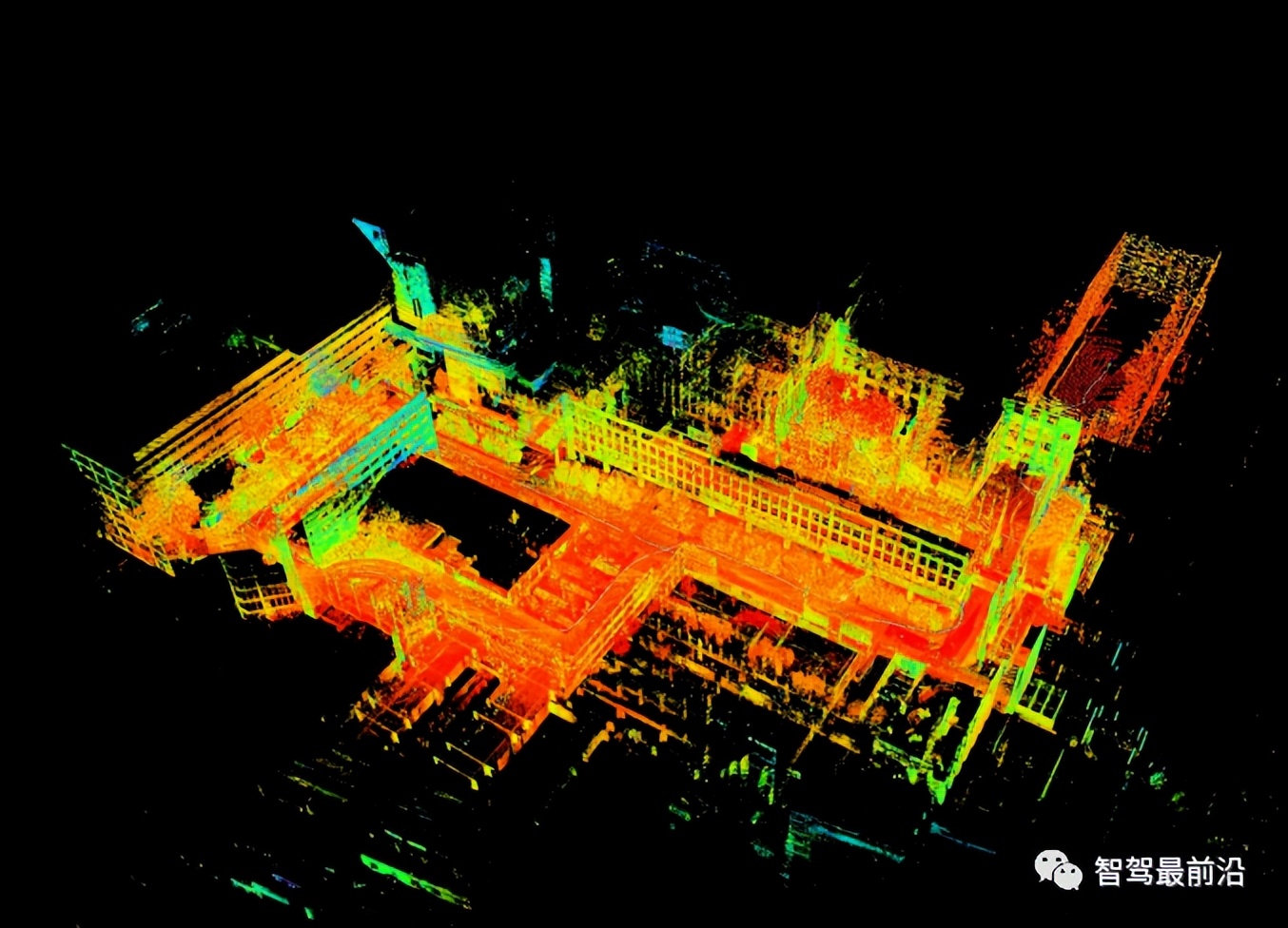
图4 激光SLAM地图(2D-3D)
1.5. 视觉定位技术
视觉传感器具有价格低、体积小和纹理信息丰富的特点,故在同时定位与建图技术的研究中占有很重要的地位。主流的视觉定位技术可以根据视觉传感模组的属性分为三大类:纯视觉定位、视觉惯导定位和RGB-D定位。纯视觉定位指仅依靠单(双)目相机形成二维图像来估计本体位姿,其中,单目视觉具有尺度不确定性,虽然双目视觉能一定程度解决,但纯视觉系统仍然有较高的位姿估计累计误差,并在复杂光照、纹理缺失的场景下可能失效。
这个问题往往通过增加IMU形成视觉惯导系统来解决,因为IMU价格低廉且可提供传感器自身的角速度和加速度。如何高效融合IMU和相机的数据也是备受业界关注的问题,其主要有两大主流解决方案可供选择:基于传统滤波的融合具有速度快的特点,但由于马尔可夫假设,其累计误差较大;基于优化的方法很好的解决了累计误差问题,但其需要较高的计算资源。视觉定位还可以通过增加深度传感器形成RGB-D模组来为视觉定位问题提供高质量的深度信息,在有稠密地图或高级语义地图需求时往往采用RGB-D定位。
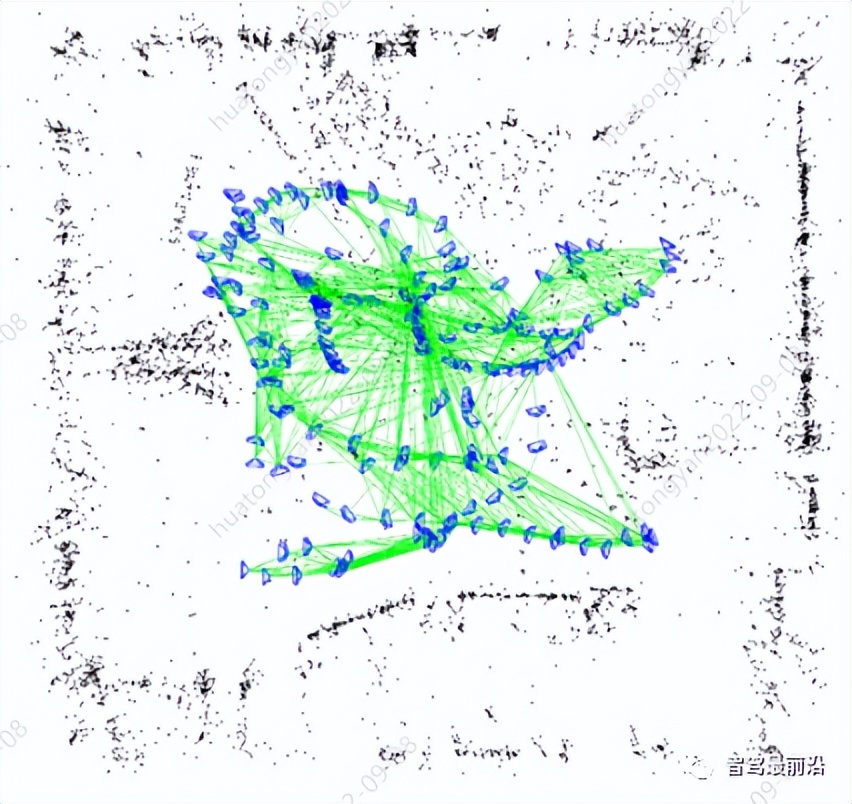

图5 纯视觉&视觉惯导稀疏地图(左)RGB-D 稠密地图(右)
激光定位技术发展现状
2.1. 2D激光定位技术发展现状
2D激光定位技术发展较早,目前已经相当成熟。2D激光雷达可以获得环境切面的2D点云,在相邻帧的点云之间做点云配准,即可获得当前帧相对于上一帧的运动,一种典型的2D点云配准算法如下图所示,黄色点云为当前帧,首先将上一帧转化为概率图,当前帧在概率图上寻找使所有点的总概率最大的位置,即为当前帧的位置。基于这种位姿推断,我们得以获得机器人的轨迹,并获得全局的2D概率栅格地图。在定位作业时,采用与2D点云配准技术类似的匹配算法,将实时扫描和地图进行配准,获得机器人在地图中的位置,如下图所示。
目前,2D SLAM已经发展出了诸多有名的开源算法框架,包括但不限于Gmapping,Hector,karto等,其中的集大成者是由Google开源的Cartographer,实现了算法性能,稳定性,功能完整性,可抑制性等多个方面的统一,可以说支撑了很多机器人相关创业公司的发展。在Cartographer之后,鲜少再有同等级别的2D SLAM框架出现。随着2D SLAM技术不断落地,所面对的问题也更加高阶。
近年来在2D SLAM领域出现了相对成熟的life-long SLAM技术,实现了建图和定位的统一,并且在定位的过程中可以实时的修正地图,克服了环境动态变换引起的地图偏差问题,这方面的代表性工作如高仙机器人在IROS-2021学术会议上发表的工作《A General Framework for Lifelong Localization and Mapping in Changing Environment》。




































