

-
[行业新闻] 京东300万台机器人订单,乙方连“被验”的......
2026-07-27
-
[行业新闻] 阿里腾讯罕见联手!墨奇智能10亿天使轮融资......
2026-07-27
-
[行业新闻] 科技助力全力以“复”!台风后京东物流全速恢......
2026-07-27
-
2026-07-22
-
[行业新闻] 立库场景:在物料转运、接驳环节输送线与AG......
2026-07-07
-
[行业新闻] 2026上海国际具身智能产业博览会与产业趋......
2026-07-07



还在为人工叉车和AGV混用场景下的托盘装载头疼吗?托盘随机摆放,AGV找不到精准位置装载效率大打折扣?别担心,科尔摩根AMS U-Zone软件带着 “黑科技” 来救场啦!它就像给AGV装上了 “智慧双眼” 和 “灵活大脑”让动态装载难题迎刃而解~
01
核心技能:精准识别+动态路径,装载不迷路
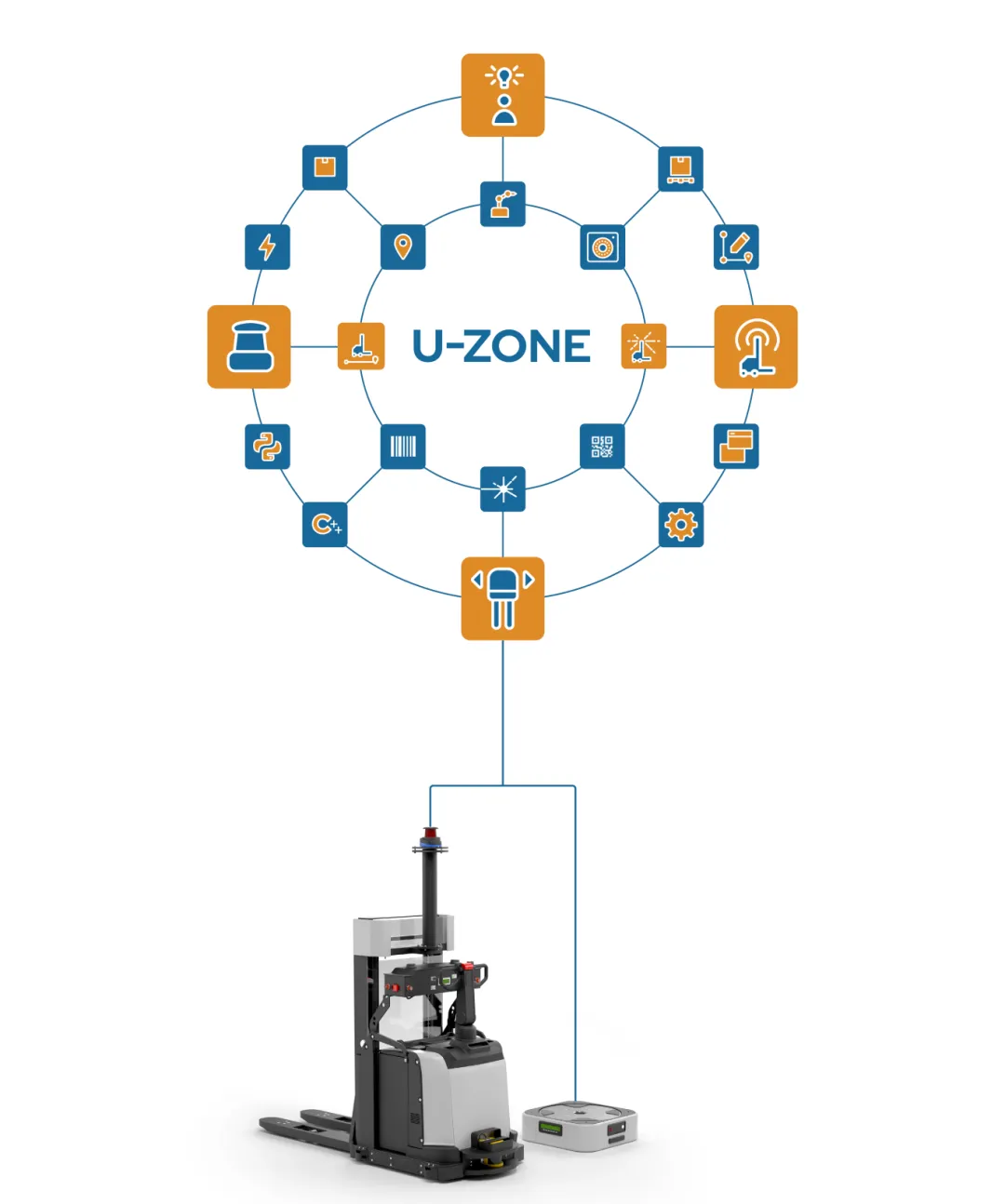
在实际项目中,存在着人工叉车和AGV混用的场景,尤其是同一个工位,托盘由人工叉车随机摆放,AGV进站装载时,需要先识别出托盘位置,再生成动态路径,移动到准确位置,完成装载操作。托盘识别的方法有很多种,ndc8lib中已经适配了两款相机,IFM O3R222和SICK Visionary-T Mini,当然您也可以使用任意第三方解决方案,本文正是基于此,介绍U-Zone的使用方法。
在Vehicle Application Designer软件中,UserDefined变量区,添加以下参数。
•PalletSensorType(INTEGER32),1=ifm camera,2=SICK Visionary-T Mini,使用第三方托盘识别,此处设0.
•PalletSensorIpAddress(String),设置ifm/SICK相机的IP地址,第三方空白。
•PalletSensor_X/ PalletSensor_Y/ PalletSensor_Angle(INTEGER32),这三个参数是指相机在车体上的安装位置,基于车体参考点坐标系,单位分别是mm,mm,0.01°.
•DockingPosition_X/DockingPosition_Y/DockingPosition_Angle(INTEGER32),如果使用ifm/SICK相机,这三个参数是指,车体参考点在托盘坐标系中,应当停车的位置。如果使用第三方,此处设0.
SimulationPallet_X/SimulationPallet_Y/SimulationPallet_Angle(INTEGER32),当使用第三方时,这三个参数定义了托盘基于相机坐标系所在的位置。
注意,这里涉及到坐标转换,有地图布局(Layout,全局)坐标系,车体参考点坐标系,相机视野坐标系。最终想实现的是,让车体参考点移动到,布局坐标系下,托盘所在的坐标位置。
因此,简单起见,可以将PalletSensor坐标组全部设0,而关联到SimulationPallet坐标组的位置,是经过换算后的,车体最终需要到达的,托盘在布局坐标系下的,目标位置。
坐标转换,可以在第三方应用中提前完成,也可以在PLC中处理后,赋予SimulationPallet坐标组。
•DockingStraightDistance(INTEGER32),该参数定义了动态路径中,最后一段直线段的长度(mm)。设置值一般应大于货叉的长度,这样可以保证,在进叉前,车体已经调正,货叉与托盘孔已对齐。
•IfmPdsDepthHint/IfmPdsPalletIndex/IfmPdsMode/IfmPdsOffset(INTEGER32),当使用ifm相机时,设置相关参数。使用第三方时,设0。
•CameraRequest(BOOL),当AGV停在拍照点时,将该变量置1,同时关联到第三方应用中,触发托盘识别流程。
•CameraDone(BOOL),当第三方应用输出托盘坐标位置后,将该变量置1,作为动态路径移动执行的启动信号。
当AGV开始移动到托盘目标位置时,将CameraDone及CameraRequest置0,以便下次操作请求。
02
布局设计:简单设置,适配复杂场景
在布局设计工具(Layout Designer)中,将进入/驶出托盘站点的两个段,都设为外部路径段。
在实际项目中,存在着人工叉车和AGV混用的场景,尤其是同一个工位,托盘由人工叉车随机摆放,AGV进站装载时,需要先识别出托盘位置,再生成动态路径,移动到准确位置,完成装载操作。托盘识别的方法有很多种,ndc8lib中已经适配了两款相机,IFM O3R222和SICK Visionary-T Mini,当然您也可以使用任意第三方解决方案,本文正是基于此,介绍U-Zone的使用方法。
在Vehicle Application Designer软件中,UserDefined变量区,添加以下参数。
•PalletSensorType(INTEGER32),1=ifm camera,2=SICK Visionary-T Mini,使用第三方托盘识别,此处设0.
•PalletSensorIpAddress(String),设置ifm/SICK相机的IP地址,第三方空白。
•PalletSensor_X/ PalletSensor_Y/ PalletSensor_Angle(INTEGER32),这三个参数是指相机在车体上的安装位置,基于车体参考点坐标系,单位分别是mm,mm,0.01°.
•DockingPosition_X/DockingPosition_Y/DockingPosition_Angle(INTEGER32),如果使用ifm/SICK相机,这三个参数是指,车体参考点在托盘坐标系中,应当停车的位置。如果使用第三方,此处设0.
SimulationPallet_X/SimulationPallet_Y/SimulationPallet_Angle(INTEGER32),当使用第三方时,这三个参数定义了托盘基于相机坐标系所在的位置。
注意,这里涉及到坐标转换,有地图布局(Layout,全局)坐标系,车体参考点坐标系,相机视野坐标系。最终想实现的是,让车体参考点移动到,布局坐标系下,托盘所在的坐标位置。
因此,简单起见,可以将PalletSensor坐标组全部设0,而关联到SimulationPallet坐标组的位置,是经过换算后的,车体最终需要到达的,托盘在布局坐标系下的,目标位置。
坐标转换,可以在第三方应用中提前完成,也可以在PLC中处理后,赋予SimulationPallet坐标组。
•DockingStraightDistance(INTEGER32),该参数定义了动态路径中,最后一段直线段的长度(mm)。设置值一般应大于货叉的长度,这样可以保证,在进叉前,车体已经调正,货叉与托盘孔已对齐。
•IfmPdsDepthHint/IfmPdsPalletIndex/IfmPdsMode/IfmPdsOffset(INTEGER32),当使用ifm相机时,设置相关参数。使用第三方时,设0。
•CameraRequest(BOOL),当AGV停在拍照点时,将该变量置1,同时关联到第三方应用中,触发托盘识别流程。
•CameraDone(BOOL),当第三方应用输出托盘坐标位置后,将该变量置1,作为动态路径移动执行的启动信号。
当AGV开始移动到托盘目标位置时,将CameraDone及CameraRequest置0,以便下次操作请求。
02
布局设计:简单设置,适配复杂场景
在布局设计工具(Layout Designer)中,将进入/驶出托盘站点的两个段,都设为外部路径段。
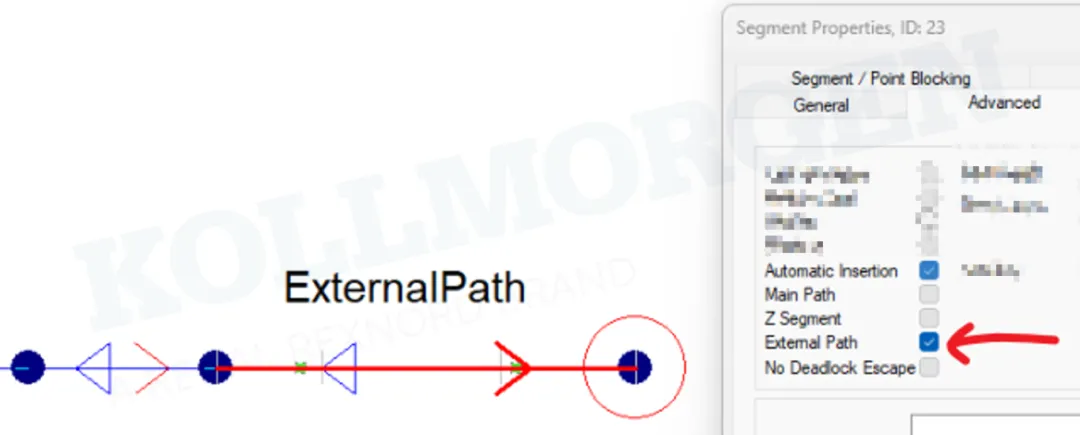
再结合PLC进行相关逻辑处理,整个操作流程可梳理为:
1. AGV被派往托盘站点取货。
2. AGV到达最后一段外部路径段的起点,等待。
3. CameraRequest置1,CVC700传给第三方应用,请求识别托盘目标位置。
4. 第三方应用将处理后的,托盘在布局坐标系下的位置,回传给CVC700。
5. 将托盘位置关联到SimulationPallet坐标组,将CameraDone置1。
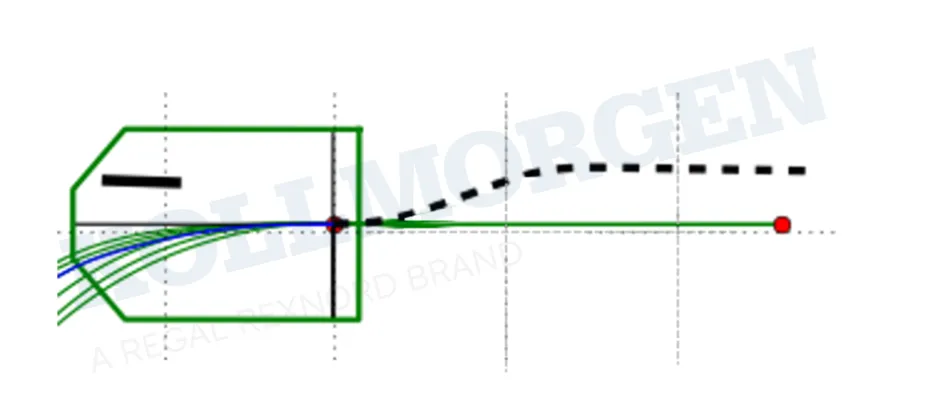
6. U-Zone应用程序将生成动态路径,命令AGV移动到托盘位置。
7. 等待托盘装载动作完成,接收驶离站点移动指令。
8. U-Zone应用程序将生成动态路径,命令AGV移动到外部路径段的起点,即原路返回站外点。
03
核心优势:灵活保密,定制专属方案
U-Zone最厉害的地方在于,它能把复杂的动态装载应用程序 “打包封装”,你只需要根据项目需求配置参数、梳理简单逻辑,就能快速搭建一套专属的作业流程。既满足了不同项目的定制化需求,让AGV作业更灵活,又能保护第三方方案的保密性,一举两得~有了科尔摩根AMS U-Zone,AGV动态装载再也不是难题!无论是适配多种识别方案,还是精准规划动态路径,它都能轻松胜任,让AGV在复杂场景下也能 “游刃有余”,大大提升作业效率。快来解锁这个AGV智能升级的 “秘密武器”,让你的物流作业更智能、更高效吧!


2026“全国移动机器人行业活动”合作商招募中
报名热线:400-0756-518、13512726426 同微信
活动时间:2025-08-01至08-31
-
 仓库不够用?不用扩建!超窄通道布局,存储量翻倍,MiMA1.6吨站驾三向堆垛式叉车+智慧仓储,赋能机械配件行业空间扩容!
仓库不够用?不用扩建!超窄通道布局,存储量翻倍,MiMA1.6吨站驾三向堆垛式叉车+智慧仓储,赋能机械配件行业空间扩容! -
 从智能感知到高效驱动,安森美以系统方案加速机器人落地
从智能感知到高效驱动,安森美以系统方案加速机器人落地 -
 死角多通道窄怎么破?AiTEN 用全向技术把仓库每一平米都用到极致!
死角多通道窄怎么破?AiTEN 用全向技术把仓库每一平米都用到极致! -
 充电有道,动力无界——走进AGV与工业车辆充电解决方案源头厂家泰坦智能
充电有道,动力无界——走进AGV与工业车辆充电解决方案源头厂家泰坦智能 -
 眸视科技获国家级行业科技奖:核工业场景智能巡检技术受认可
眸视科技获国家级行业科技奖:核工业场景智能巡检技术受认可 -
 科技创新新突破|合力宇锋荣获安徽省科学技术奖一等奖
科技创新新突破|合力宇锋荣获安徽省科学技术奖一等奖 -
 软体机器人|聚力破局向新行|SRT业务中心半年度经营大会圆满召开
软体机器人|聚力破局向新行|SRT业务中心半年度经营大会圆满召开 -
 大晓机器人王晓刚:商业化落地路径采取先To B后To C
大晓机器人王晓刚:商业化落地路径采取先To B后To C




Copyright © 2018-2025, 服务热线 400-0756-518
www.zhineng518.com,All rights reserved
版权所有 © 518智能装备在线 未经许可 严禁复制 【冀ICP备19027659号-2】 【公安备13050002001911】
运营商:河北大为信息科技有限公司