
文章
产品
搜索
标题摘要内容
【今日焦点】

【行业动态】
-
[行业新闻] 全球首秀!“真干活”的具身智能,重磅集结W......
2026-07-02
-
[行业新闻] 捷象灵越与极智嘉达成深度合作,共拓全球托盘......
2026-06-17
-
[行业新闻] 三一机器人无人叉车重磅亮相2026工程机械......
2026-06-17
-
[行业新闻] 上海ProPak开展|翼菲BAT并联机器人......
2026-06-17
-
[行业新闻] 井松智能完成董事会换届,董事长姚志坚兼任总......
2026-05-26
-
[行业新闻] AGV项目怎么评估可行性?5大维度+20个......
2026-05-22



NEWS / 新闻中心
激光雷达赋能AGV、叉车智能化,助力仓储物流高效精益
来源:深圳市镭神智能系统有限公司
|
作者:深圳市镭神智能系统有限公司
|
发布时间: 2226天前
|
6105 次浏览
|
🔊 点击朗读正文
❚❚
▶
|
分享到:
突然来临的“黑天鹅”打乱了各行各业的整体节奏,疫情影响下,一方面企业面临复工率低、人员短缺、集中风险等困境,诸多制造业、物流业仓储系统奔溃、劳动力供应风险随之暴露而出;另一方面,由疫情激发出的电商购物、线上买菜等需求使得仓储量激增,京东、淘宝、顺丰等互联网企业先进的物流仓储解决方案则交出了一份漂亮的答卷,其高效的自动化、半自动化仓储系统为疫情期间的线上服务和物资流动奠定了良好的基础。
突然来临的“黑天鹅”打乱了各行各业的整体节奏,疫情影响下,一方面企业面临复工率低、人员短缺、集中风险等困境,诸多制造业、物流业仓储系统奔溃、劳动力供应风险随之暴露而出;另一方面,由疫情激发出的电商购物、线上买菜等需求使得仓储量激增,京东、淘宝、顺丰等互联网企业先进的物流仓储解决方案则交出了一份漂亮的答卷,其高效的自动化、半自动化仓储系统为疫情期间的线上服务和物资流动奠定了良好的基础。
同时,此次疫情也为物流仓储和AGV、叉车行业带来了新的变量,用工荒现象促使很多企业深刻意识到无人叉车、AGV等自动化物流设备在工业物流领域的重要性和必要性,加速了“机器助人”的步伐,通过采用无人叉车、AGV、智能调度等方式提升仓储系统自动化水平,以解决劳动力短缺、人力成本提升、人员安全隐患和效率低下等问题,增强企业竞争力和抗风险能力,可以肯定的是,疫情过后传统的单一依赖人工操作的仓储作业方式已经无法满足未来多元的市场需求。 赋能AGV、叉车智能化
AGV、叉车想要自主行走主要是解决“在哪里?”、“要去哪?”、“怎么去?”这三个问题。“在哪里?”是定位的问题,“要去哪?”是路径规划的问题,“怎么去?”是导航的问题,解决了这三个问题也就基本上解决了AGV、叉车自由行走的问题。
 镭神基于领先的激光雷达多传感器融合、AI算法、驱动控制等关键技术研发而出的反光板定位系统、激光雷达3D SLAM定位导航系统、智能调度系统,能够为叉车、AGV客户提供整体的智能化解决方案。 1、AGV&叉车反光板定位系统解决方案
镭神基于领先的激光雷达多传感器融合、AI算法、驱动控制等关键技术研发而出的反光板定位系统、激光雷达3D SLAM定位导航系统、智能调度系统,能够为叉车、AGV客户提供整体的智能化解决方案。 1、AGV&叉车反光板定位系统解决方案
技术原理:镭神AGV/叉车反光板导航系统,通过在行驶路径周围安装用于精确位置定位的激光反光板,由AGV/叉车发射激光束,同时采集由反光板反射的激光束,来确定其当前的位置和方向(利用激光雷达精确的测距和测角信息及对特定发光板的强度信号提取,并匹配环境中已知的反光板的位置,然后再根据匹配的反光板的数据采集至少3块最近的反光板位置信息,通过三点定位算法来精确计算当前AGV/叉车激光雷达位置信息x,y,Ɵ),通过连续的三角几何运算来实现对AGV/叉车的精确定位。
技术优点:镭神AGV &叉车反光板激光导航系统有着毫米级的定位精度,反光板安装维护简易,无需地面辅助设施,行驶路径灵活多变,可在无光环境下运行以及超高性价比等优点,能够有效解决大场景下的低效重复的运输工作,提高企业工作效率。
应用案例:使用行业:电子制造应用车型:反光板定位导航AGV
项目简介:某上海著名电子工厂为减轻人工依赖,在物料运输的环节引进采用了镭神反光定位导航的AGV小车负责运输,基于半成品到成品路径关键位置安装的反光板,激光雷达定位精度可达到±1cm,作业过程更加稳定可靠,有效提升了车间的物流效率。

2、AGV自由导航系统解决方案
技术原理:镭神AGV自由导航系统,通过携带激光雷达对周围环境进行感知和自身定位,使AGV在移动过程中能高精度测出障碍物的角度和距离,增量式构建SLAM环境地图,提高自主能力和环境适应能力并结合编码器同步底盘运动和车身姿态,从而实现在未知环境下的自主定位、导航和避障。 技术优点:镭神AGV自由导航系统不需要预先铺设任何辅助导航道具,只需在未知环境中首次行驶建成SLAM地图,即可在已建好的地图中行驶,同时AGV会边行驶边记忆,学习新的路径,存储已学习的路径,在相同场景下,智能选出最佳路径完成工作任务,方便仓储、工厂等场景升级改造和导航路线变更,支持实时避障,环境适应能力强。
应用案例:使用行业:AGV设备制造应用车型:激光自由导航AGV
项目简介:某AGV制造公司是杭州著名的AGV制造商,其AGV主要面向于仓储、工厂等场景的物料配送,为了满足客户对于自动化场景的需求,推出了采用了镭神AGV自由导航方案的AGV产品,拥有自由灵活、智能处理和高性价比等特点,可自由设立货物起点和货物终点,自动选择最优路径执行和自主避障、自动回充等功能。
3、激光雷达3D SLAM无人叉车系统解决方案
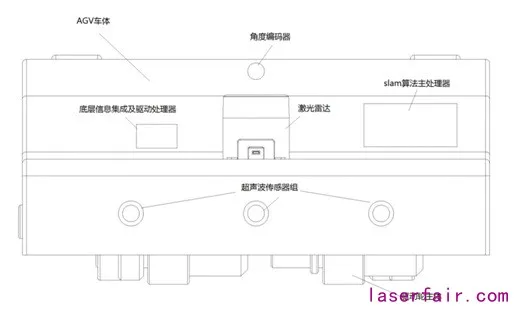
技术原理:镭神激光雷达3D SLAM无人叉车系统是一套拥有自主导航与避障、自动叉卸货、安全防护等功能的软硬件相结合的无人叉车解决方案,其集成了当今全球领先的多传感器信息融合(3D激光雷达+摄像头+IMU)、AI算法(深度学习算法检测识别栈板及集装箱环境)、电机驱动控制(底层运动控制)等技术,使叉车具有灵敏的环境感知与卓越的多环境适应能力,以及高鲁棒性的动态高精度定位技术特征。
自主导航避障功能主要通过3D激光雷达对场景的实时观测并结合SLAM算法实现,包含匹配定位、构建3D场景地图、规划路径(支持调度系统)和实时避障等功能,基于3D激光雷达构建的地图,具有更完整、更丰富的地图信息,并在此基础上联合视觉、惯导等传感器数据提升精确性和系统冗余,以适应多变的外部环境,为无人叉车安全、稳定地运行提供有力的保证。
同时,此次疫情也为物流仓储和AGV、叉车行业带来了新的变量,用工荒现象促使很多企业深刻意识到无人叉车、AGV等自动化物流设备在工业物流领域的重要性和必要性,加速了“机器助人”的步伐,通过采用无人叉车、AGV、智能调度等方式提升仓储系统自动化水平,以解决劳动力短缺、人力成本提升、人员安全隐患和效率低下等问题,增强企业竞争力和抗风险能力,可以肯定的是,疫情过后传统的单一依赖人工操作的仓储作业方式已经无法满足未来多元的市场需求。 赋能AGV、叉车智能化
AGV、叉车想要自主行走主要是解决“在哪里?”、“要去哪?”、“怎么去?”这三个问题。“在哪里?”是定位的问题,“要去哪?”是路径规划的问题,“怎么去?”是导航的问题,解决了这三个问题也就基本上解决了AGV、叉车自由行走的问题。
技术原理:镭神AGV/叉车反光板导航系统,通过在行驶路径周围安装用于精确位置定位的激光反光板,由AGV/叉车发射激光束,同时采集由反光板反射的激光束,来确定其当前的位置和方向(利用激光雷达精确的测距和测角信息及对特定发光板的强度信号提取,并匹配环境中已知的反光板的位置,然后再根据匹配的反光板的数据采集至少3块最近的反光板位置信息,通过三点定位算法来精确计算当前AGV/叉车激光雷达位置信息x,y,Ɵ),通过连续的三角几何运算来实现对AGV/叉车的精确定位。
技术优点:镭神AGV &叉车反光板激光导航系统有着毫米级的定位精度,反光板安装维护简易,无需地面辅助设施,行驶路径灵活多变,可在无光环境下运行以及超高性价比等优点,能够有效解决大场景下的低效重复的运输工作,提高企业工作效率。
应用案例:使用行业:电子制造应用车型:反光板定位导航AGV
项目简介:某上海著名电子工厂为减轻人工依赖,在物料运输的环节引进采用了镭神反光定位导航的AGV小车负责运输,基于半成品到成品路径关键位置安装的反光板,激光雷达定位精度可达到±1cm,作业过程更加稳定可靠,有效提升了车间的物流效率。
2、AGV自由导航系统解决方案
技术原理:镭神AGV自由导航系统,通过携带激光雷达对周围环境进行感知和自身定位,使AGV在移动过程中能高精度测出障碍物的角度和距离,增量式构建SLAM环境地图,提高自主能力和环境适应能力并结合编码器同步底盘运动和车身姿态,从而实现在未知环境下的自主定位、导航和避障。 技术优点:镭神AGV自由导航系统不需要预先铺设任何辅助导航道具,只需在未知环境中首次行驶建成SLAM地图,即可在已建好的地图中行驶,同时AGV会边行驶边记忆,学习新的路径,存储已学习的路径,在相同场景下,智能选出最佳路径完成工作任务,方便仓储、工厂等场景升级改造和导航路线变更,支持实时避障,环境适应能力强。
应用案例:使用行业:AGV设备制造应用车型:激光自由导航AGV
项目简介:某AGV制造公司是杭州著名的AGV制造商,其AGV主要面向于仓储、工厂等场景的物料配送,为了满足客户对于自动化场景的需求,推出了采用了镭神AGV自由导航方案的AGV产品,拥有自由灵活、智能处理和高性价比等特点,可自由设立货物起点和货物终点,自动选择最优路径执行和自主避障、自动回充等功能。
3、激光雷达3D SLAM无人叉车系统解决方案
技术原理:镭神激光雷达3D SLAM无人叉车系统是一套拥有自主导航与避障、自动叉卸货、安全防护等功能的软硬件相结合的无人叉车解决方案,其集成了当今全球领先的多传感器信息融合(3D激光雷达+摄像头+IMU)、AI算法(深度学习算法检测识别栈板及集装箱环境)、电机驱动控制(底层运动控制)等技术,使叉车具有灵敏的环境感知与卓越的多环境适应能力,以及高鲁棒性的动态高精度定位技术特征。
自主导航避障功能主要通过3D激光雷达对场景的实时观测并结合SLAM算法实现,包含匹配定位、构建3D场景地图、规划路径(支持调度系统)和实时避障等功能,基于3D激光雷达构建的地图,具有更完整、更丰富的地图信息,并在此基础上联合视觉、惯导等传感器数据提升精确性和系统冗余,以适应多变的外部环境,为无人叉车安全、稳定地运行提供有力的保证。
免责声明:所载内容及图片来源于互联网、微信公众号、企业投稿等公开渠道,本文转载仅供参考、交流。转载的稿件版权归原作者和机构所有,如有侵权,请联系我们及时删除。


2026“全国移动机器人行业活动”合作商招募中
报名热线:400-0756-518、13512726426 同微信
活动时间:2025-08-01至08-31
-
 突破镁合金量产瓶颈|上海发那科携手爱尔思开启新能源轻量化智造新局
突破镁合金量产瓶颈|上海发那科携手爱尔思开启新能源轻量化智造新局 -
 林德自动化 | 软件为核心,覆盖全场景,重塑内部物流
林德自动化 | 软件为核心,覆盖全场景,重塑内部物流 -
 荣耀时刻|聚强智能入选福布斯中国新兴科技企业T30&30
荣耀时刻|聚强智能入选福布斯中国新兴科技企业T30&30 -
 展会速览丨优地机器人在泰国AI电商展、西部数博会和成都酒店展的精彩瞬间
展会速览丨优地机器人在泰国AI电商展、西部数博会和成都酒店展的精彩瞬间 -
 “欣”征程 | 速度经营、革新协同、数智驱动、AI思维,快速推进AI时代“创业2.0”发展新征程
“欣”征程 | 速度经营、革新协同、数智驱动、AI思维,快速推进AI时代“创业2.0”发展新征程 -
 喜报|优宝特牵头申报项目入选山东省重点研发计划(重大科技创新工程)
喜报|优宝特牵头申报项目入选山东省重点研发计划(重大科技创新工程) -
 18 台 AMR 集群落地,镭神智能自研激光雷达3D SLAM 方案,助力家居龙头企业打造白色智慧工厂
18 台 AMR 集群落地,镭神智能自研激光雷达3D SLAM 方案,助力家居龙头企业打造白色智慧工厂 -
 壹号智能|从“存储密度”到“调度效率”,四向车重塑密集仓储建设逻辑
壹号智能|从“存储密度”到“调度效率”,四向车重塑密集仓储建设逻辑




Copyright © 2018-2025, 服务热线 400-0756-518
www.zhineng518.com,All rights reserved
版权所有 © 518智能装备在线 未经许可 严禁复制 【冀ICP备19027659号-2】 【公安备13050002001911】
运营商:河北大为信息科技有限公司
关注我们