

-
[行业新闻] 全球首秀!“真干活”的具身智能,重磅集结W......
2026-07-02
-
[行业新闻] 捷象灵越与极智嘉达成深度合作,共拓全球托盘......
2026-06-17
-
[行业新闻] 三一机器人无人叉车重磅亮相2026工程机械......
2026-06-17
-
[行业新闻] 上海ProPak开展|翼菲BAT并联机器人......
2026-06-17
-
[行业新闻] 井松智能完成董事会换届,董事长姚志坚兼任总......
2026-05-26
-
[行业新闻] AGV项目怎么评估可行性?5大维度+20个......
2026-05-22



这个问题往往通过增加IMU形成视觉惯导系统来解决,因为IMU价格低廉且可提供传感器自身的角速度和加速度。如何高效融合IMU和相机的数据也是备受业界关注的问题,其主要有两大主流解决方案可供选择:基于传统滤波的融合具有速度快的特点,但由于马尔可夫假设,其累计误差较大;基于优化的方法很好的解决了累计误差问题,但其需要较高的计算资源。视觉定位还可以通过增加深度传感器形成RGB-D模组来为视觉定位问题提供高质量的深度信息,在有稠密地图或高级语义地图需求时往往采用RGB-D定位。
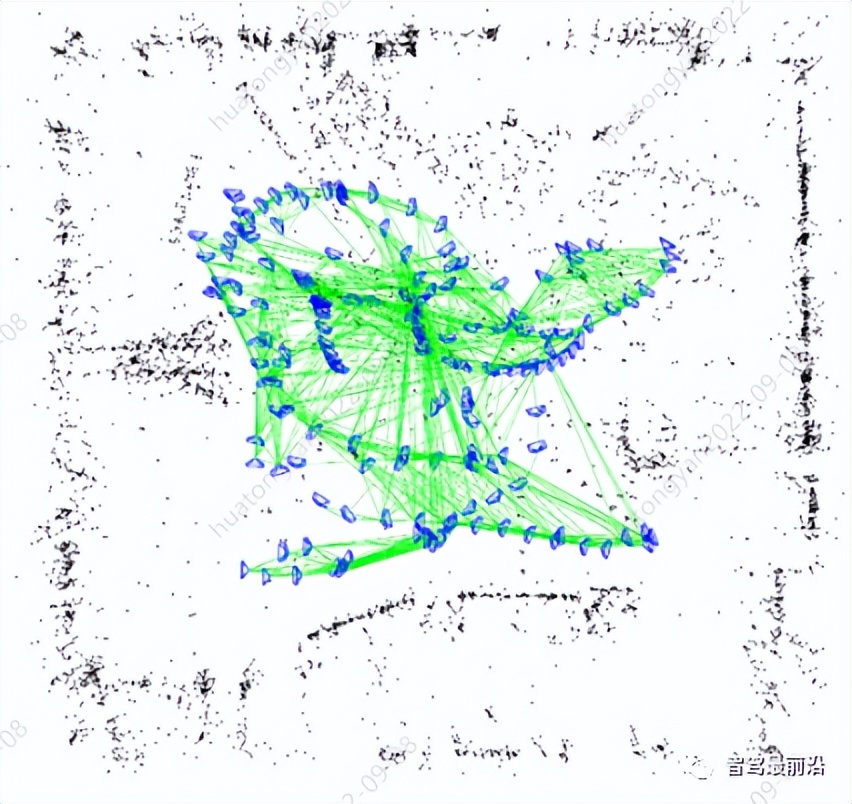

图5 纯视觉&视觉惯导稀疏地图(左)RGB-D 稠密地图(右)
激光定位技术发展现状
2.1. 2D激光定位技术发展现状
2D激光定位技术发展较早,目前已经相当成熟。2D激光雷达可以获得环境切面的2D点云,在相邻帧的点云之间做点云配准,即可获得当前帧相对于上一帧的运动,一种典型的2D点云配准算法如下图所示,黄色点云为当前帧,首先将上一帧转化为概率图,当前帧在概率图上寻找使所有点的总概率最大的位置,即为当前帧的位置。基于这种
目前,2D SLAM已经发展出了诸多有名的开源算法框架,包括但不限于Gmapping,Hector,karto等,其中的集大成者是由Google开源的Cartographer,实现了算法性能,稳定性,功能完整性,可抑制性等多个方面的统一,可以说支撑了很多机器人相关创业公司的发展。在Cartographer之后,鲜少再有同等级别的2D SLAM框架出现。随着2D SLAM技术不断落地,所面对的问题也更加高阶。
近年来在2D SLAM领域出现了相对成熟的life-long SLAM技术,实现了建图和定位的统一,并且在定位的过程中可以实时的修正地图,克服了环境动态变换引起的地图偏差问题,这方面的代表性工作如高仙机器人在IROS-2021学术会议上发表的工作《A General Framework for Lifelong Localization and Mapping in Changing Environment》。
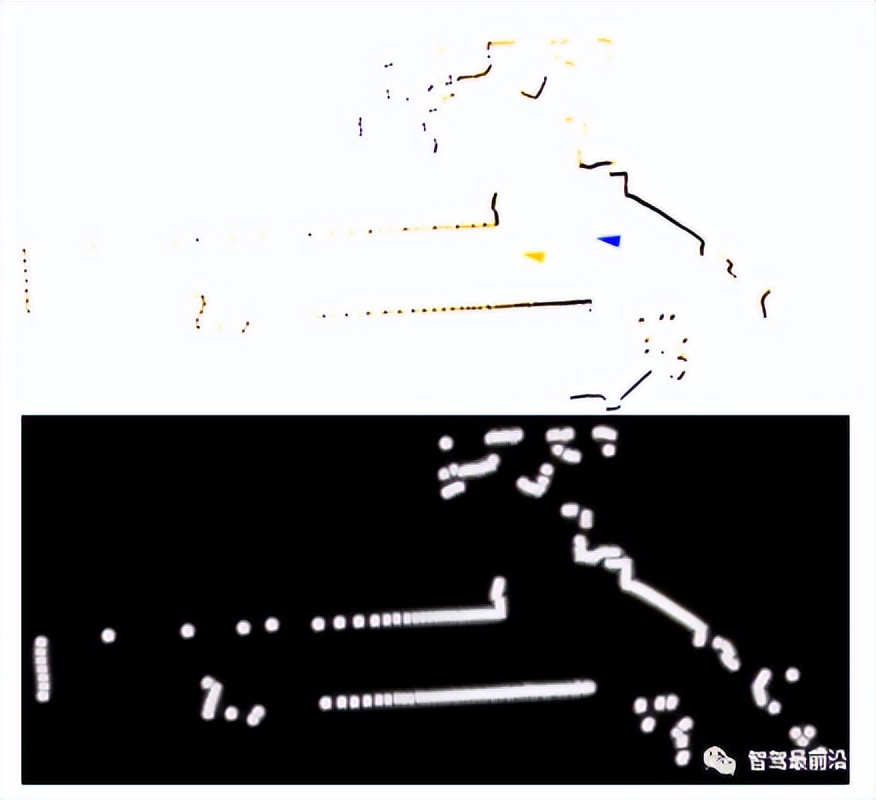


图6 2D点云配准技术(左)2D SLAM建图(中)2D激光定位(右)
2.2. 3D激光定位技术发展现状
3D激光定位技术的发展相对滞后于2D,其中的原因主要有两点:3D激光雷达,3D SLAM算法。随着以velodyne公司为代表的激光雷达厂商的发展和3D激光雷达生产工艺的成熟和成本的下探,以及以LOAM系为代表的3D SLAM算法突飞猛进的发展,3D激光SLAM技术开始实现突破,并直接促成了3D激光定位技术的大规模落地。
常见的机械式3D激光雷达方案如下图所示,在3D激光雷达内部集成了多组激光发射器和接收器,它们在电机的驱动下360度循环旋转,实现对环境的扫描,每次扫描将返回一帧完整的点云。近年来,固态激光雷达也获得了快速的发展并开始投入商用,国内如览沃、速腾聚创、禾赛激光等厂商也初步推出了固态激光雷达产品。固态激光雷达的最大优势在于成本,随着产量的提升,成本预计将下探到同等机械激光雷达成本的十分之一。但固态雷达在点云形态上与机械激光雷达不同,通常FoV(视场角)较小,类似于深度相机。基于固态雷达的SLAM技术目前已经得到了发展,但仍有进一步提升的空间。同样受限于FoV太小,基于固态激光雷达的定位技术目前还不够成熟。
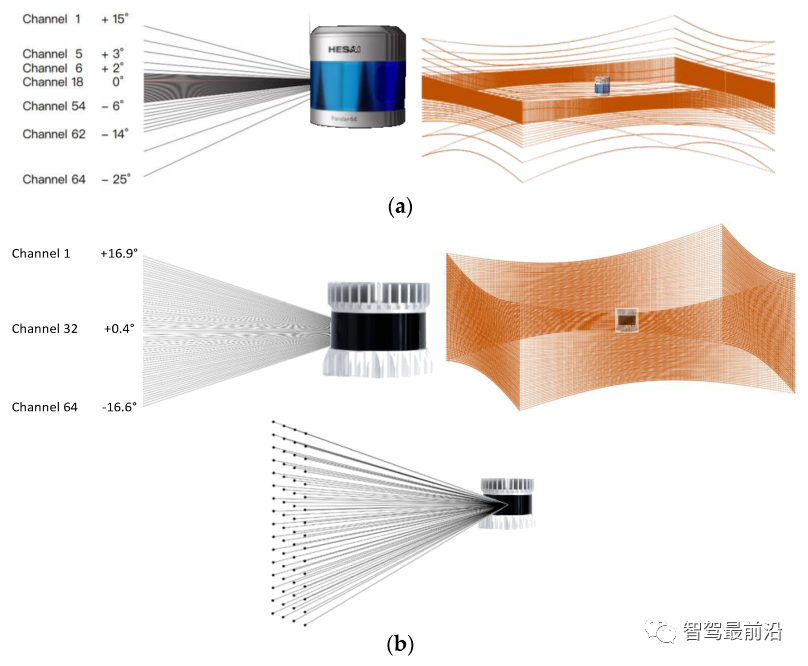
图7 传统旋转式机械激光雷达及其典型点云图

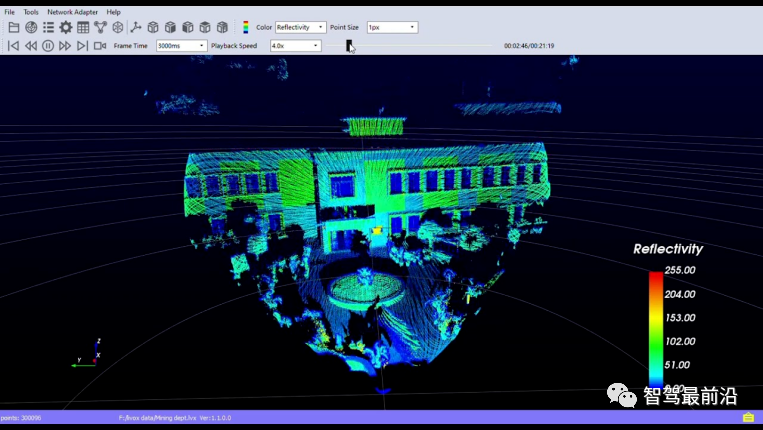
图8 固态激光雷达及其典型点云图
3D SLAM算法的爆发性发展可以追随到2014年由Ji Zhang发表的论文《LOAM: Lidar Odometry and Mapping in Real-time》,该论文首次提出了基于边缘特征和平面特征的点云配准算法,实现了兼顾速度和精度的激光SLAM建图,该方案简称为LOAM。其提出的特征点配准方法启发了大量后续研究,代表性的有LeGO-LOAM,LIO-SAM等。同时,随着算力和算法的进步,基于ICP(Iterative Closest Point, 迭代最近点)的一些衍生型点云配准算法(如G-ICP,VGICP)等也得到了发展。这些点云配准技术的进步,结合多传感器融合算法的进步(滤波和非线性优化,松耦合和紧耦合),实现了更高阶的3D SLAM技术,代表性开源方案有FAST-LIO2,Super-Odometry等。
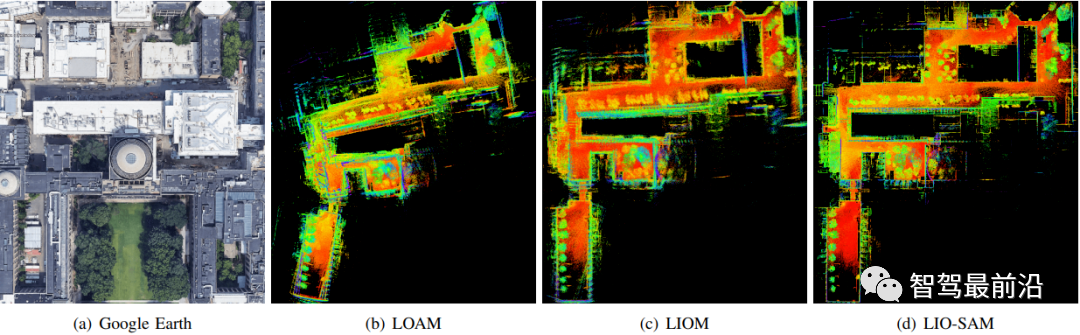
图9 卫星图及算法所建点云图
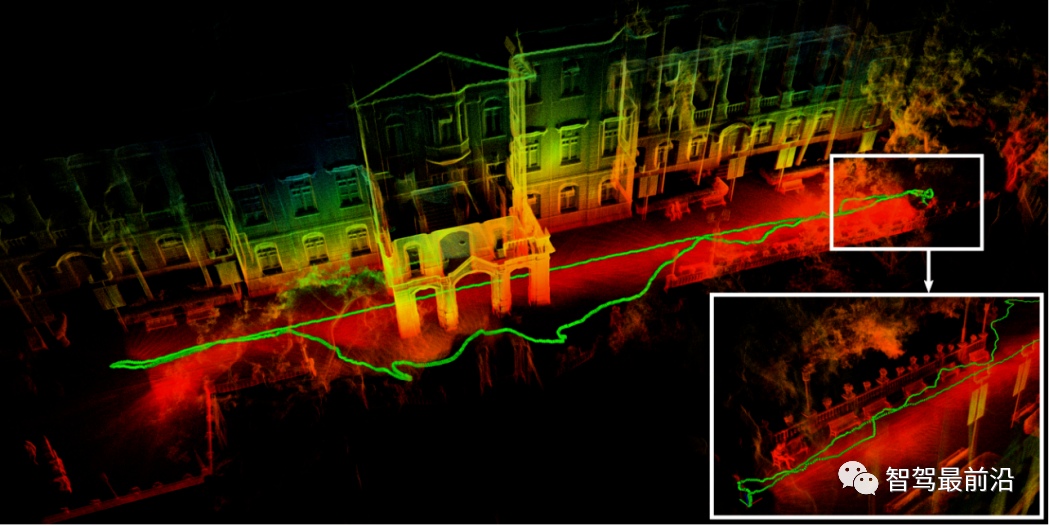
图10 FAST-LIO2算法建图
3D定位技术与SLAM技术的发展息息相关,在机器人领域,3D定位功能作为SLAM的应用之一出现;而在自动驾驶领域,3D定位则未必需要建图(存在关于是否需要高精地图的技术路线之争)。3D定位技术同样非常强调多传感器融合,通常至少需要融合3D激光雷达和IMU,其它的传感器还包括轮式里程计、GNSS等。虽然有一些开源框架也支持定位模式,比如HDL-Graph-SLAM,Cartographer(3D)等,但并不能达到直接商用落地的要求。综合来讲,各个机器人公司的3D定位技术都会在开源算法的基础上进行开发,或直接借助开源算法框架,或借助开源技术和公开论文全栈自研。


2026“全国移动机器人行业活动”合作商招募中
报名热线:400-0756-518、13512726426 同微信
活动时间:2025-08-01至08-31
-
 突破镁合金量产瓶颈|上海发那科携手爱尔思开启新能源轻量化智造新局
突破镁合金量产瓶颈|上海发那科携手爱尔思开启新能源轻量化智造新局 -
 林德自动化 | 软件为核心,覆盖全场景,重塑内部物流
林德自动化 | 软件为核心,覆盖全场景,重塑内部物流 -
 荣耀时刻|聚强智能入选福布斯中国新兴科技企业T30&30
荣耀时刻|聚强智能入选福布斯中国新兴科技企业T30&30 -
 展会速览丨优地机器人在泰国AI电商展、西部数博会和成都酒店展的精彩瞬间
展会速览丨优地机器人在泰国AI电商展、西部数博会和成都酒店展的精彩瞬间 -
 “欣”征程 | 速度经营、革新协同、数智驱动、AI思维,快速推进AI时代“创业2.0”发展新征程
“欣”征程 | 速度经营、革新协同、数智驱动、AI思维,快速推进AI时代“创业2.0”发展新征程 -
 喜报|优宝特牵头申报项目入选山东省重点研发计划(重大科技创新工程)
喜报|优宝特牵头申报项目入选山东省重点研发计划(重大科技创新工程) -
 18 台 AMR 集群落地,镭神智能自研激光雷达3D SLAM 方案,助力家居龙头企业打造白色智慧工厂
18 台 AMR 集群落地,镭神智能自研激光雷达3D SLAM 方案,助力家居龙头企业打造白色智慧工厂 -
 壹号智能|从“存储密度”到“调度效率”,四向车重塑密集仓储建设逻辑
壹号智能|从“存储密度”到“调度效率”,四向车重塑密集仓储建设逻辑




Copyright © 2018-2025, 服务热线 400-0756-518
www.zhineng518.com,All rights reserved
版权所有 © 518智能装备在线 未经许可 严禁复制 【冀ICP备19027659号-2】 【公安备13050002001911】
运营商:河北大为信息科技有限公司